9. DDPG 与 TD3 算法
具身智能视角:DDPG 和 TD3 是机械臂控制、灵巧手操作等连续控制任务的经典算法。它们使用确定性策略直接输出关节力矩,配合经验回放实现 off-policy 训练,样本效率较高。
9.1 DPG 算法
在经典策略梯度算法中,我们学习的是随机性策略
在某些情况下,使用确定性策略更加高效。确定性策略直接将状态映射到一个具体的动作:
对应的策略梯度表达式:
这就是确定性策略梯度(DPG) 算法的核心。
9.2 DDPG 算法
基于 DPG 方法,DDPG 算法增加了几个关键要素:
9.2.1 OU 噪声
引入噪声的目的是为了增加策略的探索性。OU(Ornstein-Uhlenbeck)噪声是一种具有回归特性的随机过程:
代入到 DDPG 算法中,最终的动作选择为:
OU 噪声相比高斯噪声的优点在于:
- 探索性:持续的、自相关的特性使得探索更加平滑稳定
- 可控性:回归特性使噪声逐渐减小,早期探索多,后期利用多
- 稳定性:避免剧烈抖动,保持动作的连续性
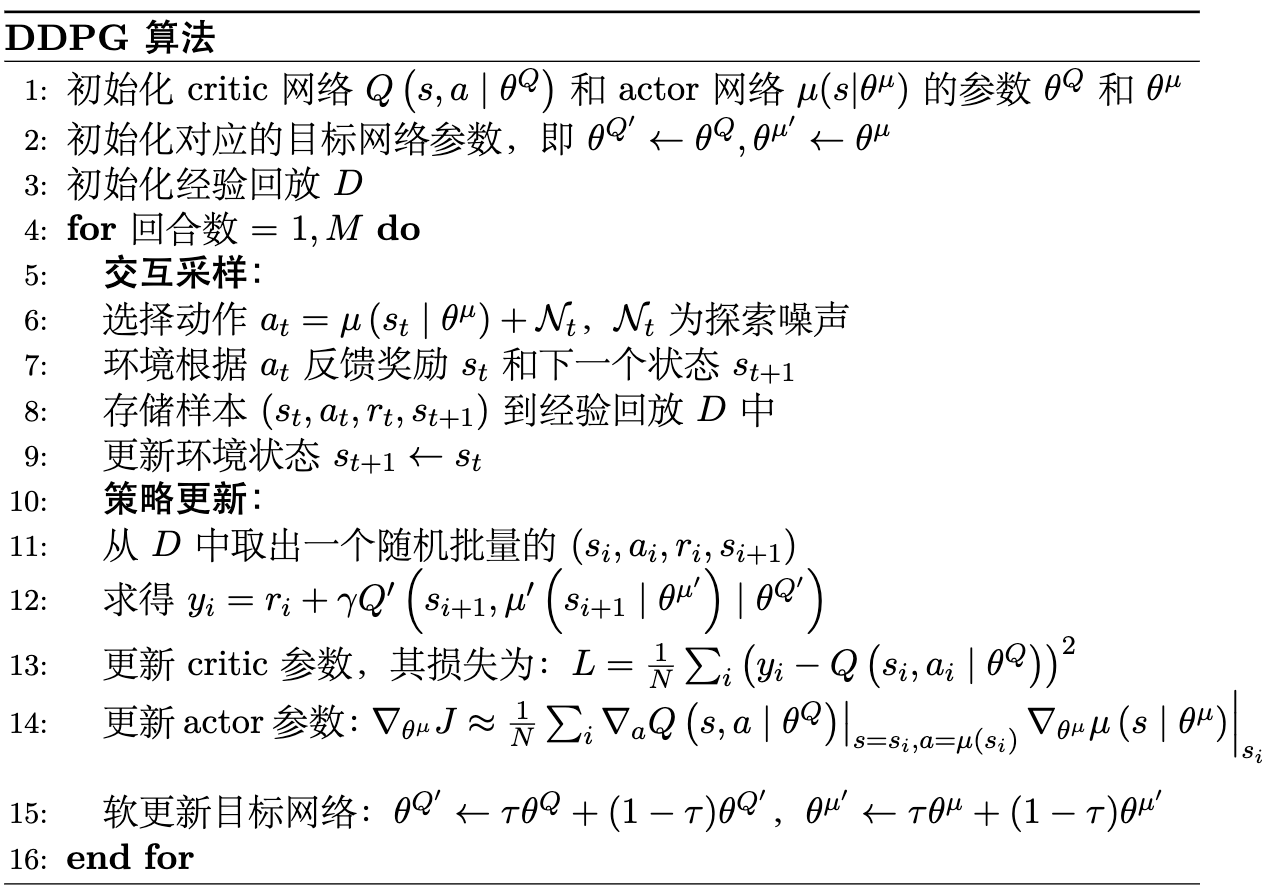
DDPG 算法的整体流程如图 1 所示:
DDPG 算法中目标网络使用软更新(Soft Update),使目标网络参数平滑变化,提高训练的稳定性和收敛性。
9.3 TD3 算法
DDPG 算法容易出现
9.3.1 双 Q 网络
使用两个独立的 Critic 网络来估计动作的价值。在计算目标值时,取两个
对应损失函数:
9.3.2 延迟更新
Actor 网络的更新频率低于 Critic 网络。Critic 学得更快、决策更准确后,Actor 才跟进更新。实践中,Critic 每更新 10 次,Actor 只更新 1 次。
9.3.3 目标策略平滑
在计算目标值时给目标策略添加噪声,并增加裁剪:
这种噪声正则化提高了 Critic 本身的抗干扰性和稳定性。
9.4 思考
DDPG 算法是 off-policy 算法吗?为什么?
是的。DDPG 结合了经验回放、目标网络和确定性策略,是典型的 off-policy 算法。这意味着它可以重用历史数据,样本效率较高,适合与仿真环境结合使用。
软更新相比于硬更新的好处是什么?为什么不是所有的算法都用软更新?
好处:(1) 平滑目标更新:逐渐调整目标网络的参数,降低目标的变化幅度,减少训练中的不稳定性;(2) 降低方差;(3) 避免振荡:减少目标网络和主网络之间的振荡,有助于更稳定地收敛。缺点:(1) 速度较慢;(2) 一些算法可能需要更频繁地探索新策略,硬更新允许完全用新策略替代旧策略;(3) 某些算法对硬更新更敏感,硬更新是其关键组成部分。综上,选择哪种方式取决于具体的问题和算法要求。
TD3 相比 DDPG 的改进总结:
- 双 Q 网络 → 使用两个独立的 Q 网络减少 Q 值过估计
- 延迟更新 → Critic 更新频率高于 Actor,提高训练稳定性
- 目标策略平滑 → 给目标策略添加噪声正则化,提高 Critic 抗干扰性
TD3 算法中 Critic 的更新频率是更快还是更慢?
Critic 网络的更新频率要比 Actor 网络更快,即延迟策略更新。目的是减小策略更新的频率,避免过度优化。因为 Critic 网络更新更快,可以更快地适应环境变化,提供更准确的动作价值估计,从而帮助 Actor 网络生成更好的策略。