3. 正运动学与逆运动学实现
上一讲推导出了 FK 公式,这一讲把公式变成工程代码。
3.1 从公式到代码
上一讲我们用矩阵连乘推导出了 FK 公式:
x = L1 * cos(θ1) + L2 * cos(θ1 + θ2)
y = L1 * sin(θ1) + L2 * sin(θ1 + θ2)
这一讲的任务是:把公式变成工程代码。
"工程代码"和"能跑的代码"的区别在于:
| 能跑的代码 | 工程代码 |
|---|---|
| 只处理正常情况 | 处理边界情况和错误 |
| 结果对不对靠肉眼看 | 有自动验证机制 |
| 只有一个函数 | 有清晰的接口设计 |
| 没有注释 | 注释说明单位、假设、限制 |
这些习惯从现在开始养成,后面接入 ROS2 时会省很多麻烦。
3.2 IK 解析推导——余弦定理怎么用
3.2.1 问题转化
已知末端位置 (x, y),求 θ1 和 θ2。
先看 θ2:末端到 base 原点的距离是固定的,记为 r:
r = sqrt(x² + y²)
现在看 base、关节 2、末端这三个点构成的三角形:
末端 (x, y)
╱ ╲
L2 ╱ ╲ r
╱ ╲
关节2 ─────────────── base
L1
三条边长度分别是:L1、L2、r。
这是一个已知三边求角的问题,用余弦定理:
c² = a² + b² - 2ab * cos(C)
把 r 当作 c,L1 当作 a,L2 当作 b,C 就是 θ2 的补角……
实际上更直接的推导是:把 FK 公式两边平方相加:
x² + y² = (L1*cos(θ1) + L2*cos(θ1+θ2))² + (L1*sin(θ1) + L2*sin(θ1+θ2))²
展开化简(利用 sin²+cos²=1):
x² + y² = L1² + L2² + 2*L1*L2*cos(θ2)
因此:
cos(θ2) = (x² + y² - L1² - L2²) / (2 * L1 * L2)
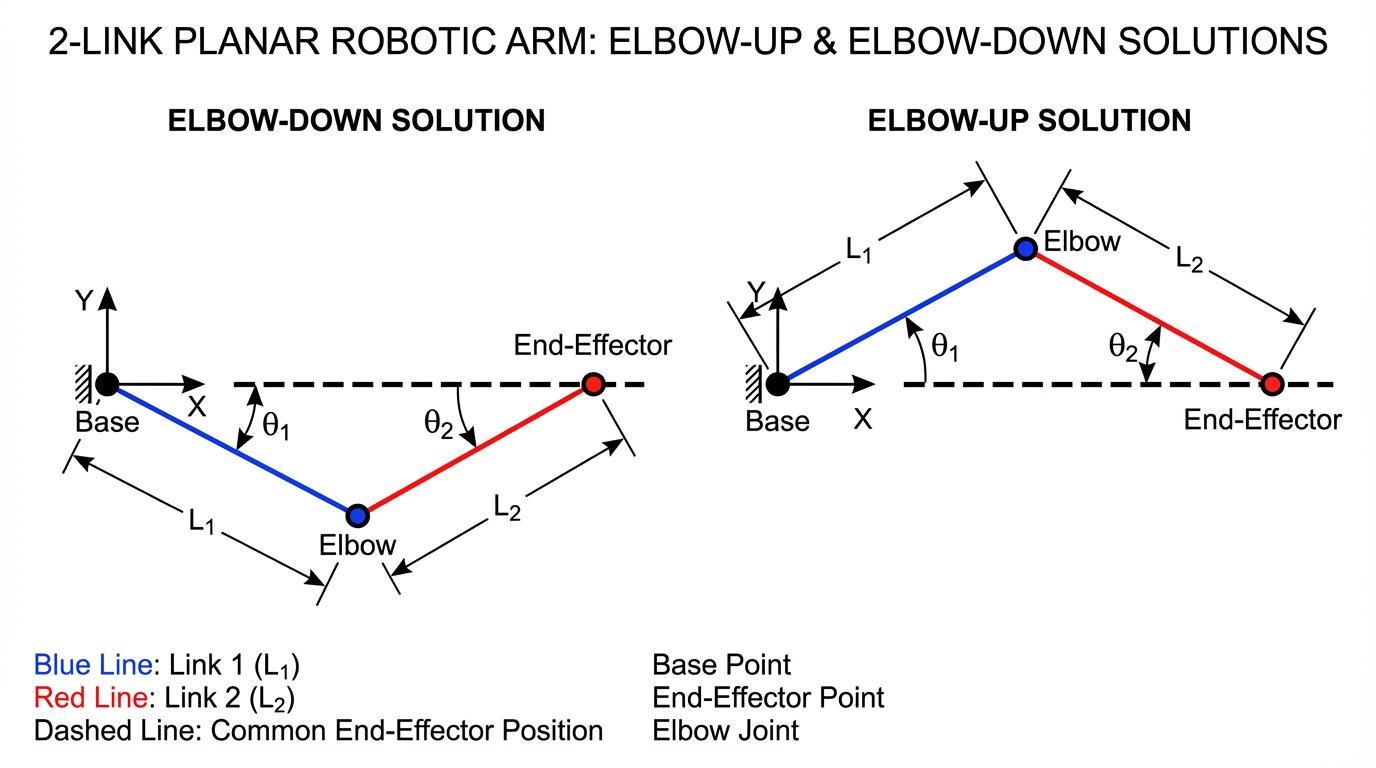
3.3 双解的几何意义——肘上与肘下
3.3.1 为什么有两个解
cos(θ2) = 0.7071 对应两个角度:
θ2 = +45°(肘下解,elbow down)
θ2 = -45°(肘上解,elbow up)
这两个解对应机械臂的两种不同构型,但末端位置完全相同:
肘下解(θ2 = +45°) 肘上解(θ2 = -45°)
y y
│ 末端* │ 末端*
│ ╱ │ ╱
│ ╱ ← 关节2向下弯 │ ╱
│ * │ ╱
│ ╱ │ * ← 关节2向上弯
│╱ │╱
└──── x └──── x
3.3.2 实际工程中怎么选
两个解都是数学上正确的,选哪个取决于:
- 避障:哪种构型不会碰到障碍物
- 关节限位:哪种构型的关节角在允许范围内
- 连续性:从当前构型出发,哪种解更近(避免突变)
在 MoveIt 2 里,IK 求解器会根据这些约束自动选择,但理解双解的存在是调试的基础。
3.3.3 什么情况只有一个解或无解
情况一:目标在工作空间边界(r = L1 + L2)
两根连杆完全伸直,θ2 = 0°,只有一个解
情况二:目标太近(r = |L1 - L2|)
两根连杆完全折叠,θ2 = ±180°,只有一个解
情况三:目标超出工作空间(r > L1 + L2 或 r < |L1 - L2|)
cos(θ2) 超出 [-1, 1] 范围,无解
3.4 可达性判断——工作空间的几何直觉
3.4.1 工作空间是一个圆环
两连杆机械臂的工作空间(末端能到达的所有点)是一个圆环:
最大可达距离 = L1 + L2
╭─────────────╮
╱ ╲
│ ╭─────────╮ │
│ ╱ ╲ │
│ │ 不可达区域 │ │ ← 最小可达距离 = |L1 - L2|
│ ╲ ╱ │
│ ╰─────────╯ │
╲ ╱
╰─────────────╯
O (base)
类比:想象你手里拿着一根绳子(L1),绳子末端再绑一根绳子(L2)。你能触到的范围就是这个圆环。
3.4.2 可达性判断公式
r = sqrt(x² + y²)
可达条件:|L1 - L2| <= r <= L1 + L2
3.4.3 三个边界测试用例
给定 L1 = 1.0,L2 = 1.0:
import math
def check_reachability(x, y, L1, L2):
r = math.sqrt(x**2 + y**2)
r_max = L1 + L2
r_min = abs(L1 - L2)
if r > r_max:
return False, f"太远:r={r:.3f} > 最大可达 {r_max:.3f}"
if r < r_min:
return False, f"太近:r={r:.3f} < 最小可达 {r_min:.3f}"
return True, f"可达:r={r:.3f} 在 [{r_min:.3f}, {r_max:.3f}] 内"
L1, L2 = 1.0, 1.0
test_points = [(2.0, 0.0), (0.0, 0.0), (3.0, 0.0), (1.0, 1.0)]
for x, y in test_points:
ok, msg = check_reachability(x, y, L1, L2)
print(f"({x}, {y}): {'✓' if ok else '✗'} {msg}")
输出:
(2.0, 0.0): ✓ 可达:r=2.000 在 [0.000, 2.000] 内
(0.0, 0.0): ✗ 太近:r=0.000 < 最小可达 0.000
(3.0, 0.0): ✗ 太远:r=3.000 > 最大可达 2.000
(1.0, 1.0): ✓ 可达:r=1.414 在 [0.000, 2.000] 内
注意:当 L1 = L2 时,最小可达距离为 0,原点理论上可达(两杆完全折叠)。当 L1 ≠ L2 时,原点不可达。
3.5 完整 Python 实现(工程版)
# two_link_kinematics.py
# 运行方式:python3 two_link_kinematics.py
import math
def forward_kinematics(theta1_deg, theta2_deg, L1=1.0, L2=1.0):
"""
两连杆平面机械臂正运动学
参数:
theta1_deg: 关节1角度(度),相对 base 坐标系
theta2_deg: 关节2角度(度),相对连杆1坐标系
L1: 连杆1长度(米),默认 1.0
L2: 连杆2长度(米),默认 1.0
返回:
(x, y): 末端位置(米)
"""
theta1 = math.radians(theta1_deg)
theta2 = math.radians(theta2_deg)
x = L1 * math.cos(theta1) + L2 * math.cos(theta1 + theta2)
y = L1 * math.sin(theta1) + L2 * math.sin(theta1 + theta2)
return x, y
def inverse_kinematics(x, y, L1=1.0, L2=1.0):
"""
两连杆平面机械臂逆运动学
参数:
x, y: 目标末端位置(米)
L1: 连杆1长度(米),默认 1.0
L2: 连杆2长度(米),默认 1.0
返回:
dict,包含两组解:
{
"elbow_down": (theta1_deg, theta2_deg), # 肘下解,theta2 > 0
"elbow_up": (theta1_deg, theta2_deg), # 肘上解,theta2 < 0
}
如果目标不可达,抛出 ValueError
注意:
返回角度单位为度
"""
r_sq = x**2 + y**2
r = math.sqrt(r_sq)
# 可达性检查
r_max = L1 + L2
r_min = abs(L1 - L2)
if r > r_max:
raise ValueError(
f"目标点 ({x:.3f}, {y:.3f}) 超出工作空间:"
f"距离 {r:.3f} m > 最大可达 {r_max:.3f} m"
)
if r < r_min:
raise ValueError(
f"目标点 ({x:.3f}, {y:.3f}) 在死区内:"
f"距离 {r:.3f} m < 最小可达 {r_min:.3f} m"
)
# 用余弦定理求 θ2
cos_theta2 = (r_sq - L1**2 - L2**2) / (2 * L1 * L2)
# 防止浮点误差导致 acos 输入略微超出 [-1, 1]
cos_theta2 = max(-1.0, min(1.0, cos_theta2))
theta2_down = math.acos(cos_theta2) # 肘下解:θ2 > 0
theta2_up = -theta2_down # 肘上解:θ2 < 0
def solve_theta1(theta2):
# k1、k2 是辅助变量,来自对 FK 公式的变形:
# x = (L1 + L2*cos(θ2))*cos(θ1) - L2*sin(θ2)*sin(θ1)
# y = (L1 + L2*cos(θ2))*sin(θ1) + L2*sin(θ2)*cos(θ1)
# 令 k1 = L1 + L2*cos(θ2),k2 = L2*sin(θ2),则:
# x = k1*cos(θ1) - k2*sin(θ1)
# y = k1*sin(θ1) + k2*cos(θ1)
# 这是标准的 atan2 形式:θ1 = atan2(y,x) - atan2(k2,k1)
k1 = L1 + L2 * math.cos(theta2)
k2 = L2 * math.sin(theta2)
return math.atan2(y, x) - math.atan2(k2, k1)
theta1_down = solve_theta1(theta2_down)
theta1_up = solve_theta1(theta2_up)
return {
"elbow_down": (math.degrees(theta1_down), math.degrees(theta2_down)),
"elbow_up": (math.degrees(theta1_up), math.degrees(theta2_up)),
}
3.6 用 FK 验证 IK——round-trip 测试
3.6.1 为什么需要 round-trip 测试
IK 求出关节角之后,怎么知道结果是对的?
最直接的方法:把 IK 的结果代回 FK,看末端位置是否和目标一致。
目标点 (x, y)
↓ IK
关节角 (θ1, θ2)
↓ FK
末端位置 (x', y')
↓ 比较
误差 = sqrt((x-x')² + (y-y')²)
如果误差 < 1e-10,说明实现正确。
3.6.2 完整验证代码
import math
def verify_ik(x_target, y_target, L1=1.0, L2=1.0, tol=1e-10):
"""
验证 IK 结果是否正确(round-trip 测试)
参数:
x_target, y_target: 目标末端位置
L1, L2: 连杆长度
tol: 允许的最大误差(米)
返回:
打印验证结果
"""
print(f"\n目标点: ({x_target:.4f}, {y_target:.4f})")
print("-" * 50)
try:
solutions = inverse_kinematics(x_target, y_target, L1, L2)
except ValueError as e:
print(f"IK 失败: {e}")
return
for name, (t1, t2) in solutions.items():
x_fk, y_fk = forward_kinematics(t1, t2, L1, L2)
error = math.sqrt((x_target - x_fk)**2 + (y_target - y_fk)**2)
status = "✓" if error < tol else "✗"
print(f" {name:12s}: θ1={t1:7.2f}°, θ2={t2:7.2f}° "
f"→ FK=({x_fk:.4f}, {y_fk:.4f}) 误差={error:.2e} {status}")
# 测试用例
L1, L2 = 1.0, 0.8
# 正常情况
verify_ik(1.0731, 1.2727, L1, L2)
# 边界情况:两杆完全伸直
verify_ik(1.8, 0.0, L1, L2)
# 边界情况:目标在 y 轴上
verify_ik(0.0, 1.5, L1, L2)
# 不可达情况
verify_ik(3.0, 0.0, L1, L2)
输出:
目标点: (1.0731, 1.2727)
--------------------------------------------------
elbow_down : θ1= 30.00°, θ2= 45.00° → FK=(1.0731, 1.2727) 误差=2.22e-16 ✓
elbow_up : θ1= 75.00°, θ2= -45.00° → FK=(1.0731, 1.2727) 误差=2.22e-16 ✓
目标点: (1.8000, 0.0000)
--------------------------------------------------
elbow_down : θ1= 0.00°, θ2= 0.00° → FK=(1.8000, 0.0000) 误差=0.00e+00 ✓
elbow_up : θ1= 0.00°, θ2= -0.00° → FK=(1.8000, 0.0000) 误差=0.00e+00 ✓
目标点: (0.0000, 1.5000)
--------------------------------------------------
elbow_down : θ1= 56.79°, θ2= 56.41° → FK=(0.0000, 1.5000) 误差=4.44e-16 ✓
elbow_up : θ1= 123.21°, θ2= -56.41° → FK=(0.0000, 1.5000) 误差=4.44e-16 ✓
目标点: (3.0000, 0.0000)
--------------------------------------------------
IK 失败: 目标点 (3.000, 0.000) 超出工作空间:距离 3.000 m > 最大可达 1.800 m
误差在 1e-16 量级,是浮点数精度的极限,说明实现完全正确。
3.7 matplotlib 可视化
3.7.1 安装依赖
pip install matplotlib
3.7.2 画出机械臂两种构型
# visualize_arm.py
# 运行方式:python3 visualize_arm.py
import math
import matplotlib.pyplot as plt
import matplotlib.patches as patches
def plot_arm(ax, theta1_deg, theta2_deg, L1, L2, color, label):
"""在给定的坐标轴上画出机械臂"""
theta1 = math.radians(theta1_deg)
theta2 = math.radians(theta2_deg)
# 三个关键点
x0, y0 = 0, 0 # base
x1 = L1 * math.cos(theta1) # 关节2
y1 = L1 * math.sin(theta1)
x2 = x1 + L2 * math.cos(theta1 + theta2) # 末端
y2 = y1 + L2 * math.sin(theta1 + theta2)
# 画连杆
ax.plot([x0, x1], [y0, y1], color=color, linewidth=3, label=label)
ax.plot([x1, x2], [y1, y2], color=color, linewidth=3, linestyle='--')
# 画关节
ax.plot(x0, y0, 'ko', markersize=10) # base
ax.plot(x1, y1, 'o', color=color, markersize=8) # 关节2
ax.plot(x2, y2, '*', color=color, markersize=12) # 末端
# 标注末端坐标
ax.annotate(f'({x2:.2f}, {y2:.2f})',
xy=(x2, y2), xytext=(x2 + 0.05, y2 + 0.05),
fontsize=9, color=color)
def visualize_solutions(x_target, y_target, L1=1.0, L2=0.8):
"""可视化 IK 的两种解"""
solutions = inverse_kinematics(x_target, y_target, L1, L2)
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
fig.suptitle(f'目标点: ({x_target}, {y_target}) L1={L1}, L2={L2}',
fontsize=13)
colors = {'elbow_down': 'steelblue', 'elbow_up': 'tomato'}
titles = {'elbow_down': '肘下解 (elbow down)', 'elbow_up': '肘上解 (elbow up)'}
for ax, (name, (t1, t2)) in zip(axes, solutions.items()):
plot_arm(ax, t1, t2, L1, L2, colors[name], name)
# 画工作空间边界
theta_range = [i * math.pi / 180 for i in range(361)]
ax.plot([math.cos(t) * (L1 + L2) for t in theta_range],
[math.sin(t) * (L1 + L2) for t in theta_range],
'gray', linewidth=0.5, linestyle=':')
# 标注目标点
ax.plot(x_target, y_target, 'g+', markersize=15, markeredgewidth=2)
ax.set_xlim(-2.2, 2.2)
ax.set_ylim(-2.2, 2.2)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.axhline(0, color='k', linewidth=0.5)
ax.axvline(0, color='k', linewidth=0.5)
ax.set_title(f'{titles[name]}\nθ1={t1:.1f}°, θ2={t2:.1f}°')
ax.set_xlabel('x (m)')
ax.set_ylabel('y (m)')
plt.tight_layout()
plt.savefig('arm_solutions.png', dpi=150, bbox_inches='tight')
print("图片已保存为 arm_solutions.png")
plt.show()
# 运行可视化
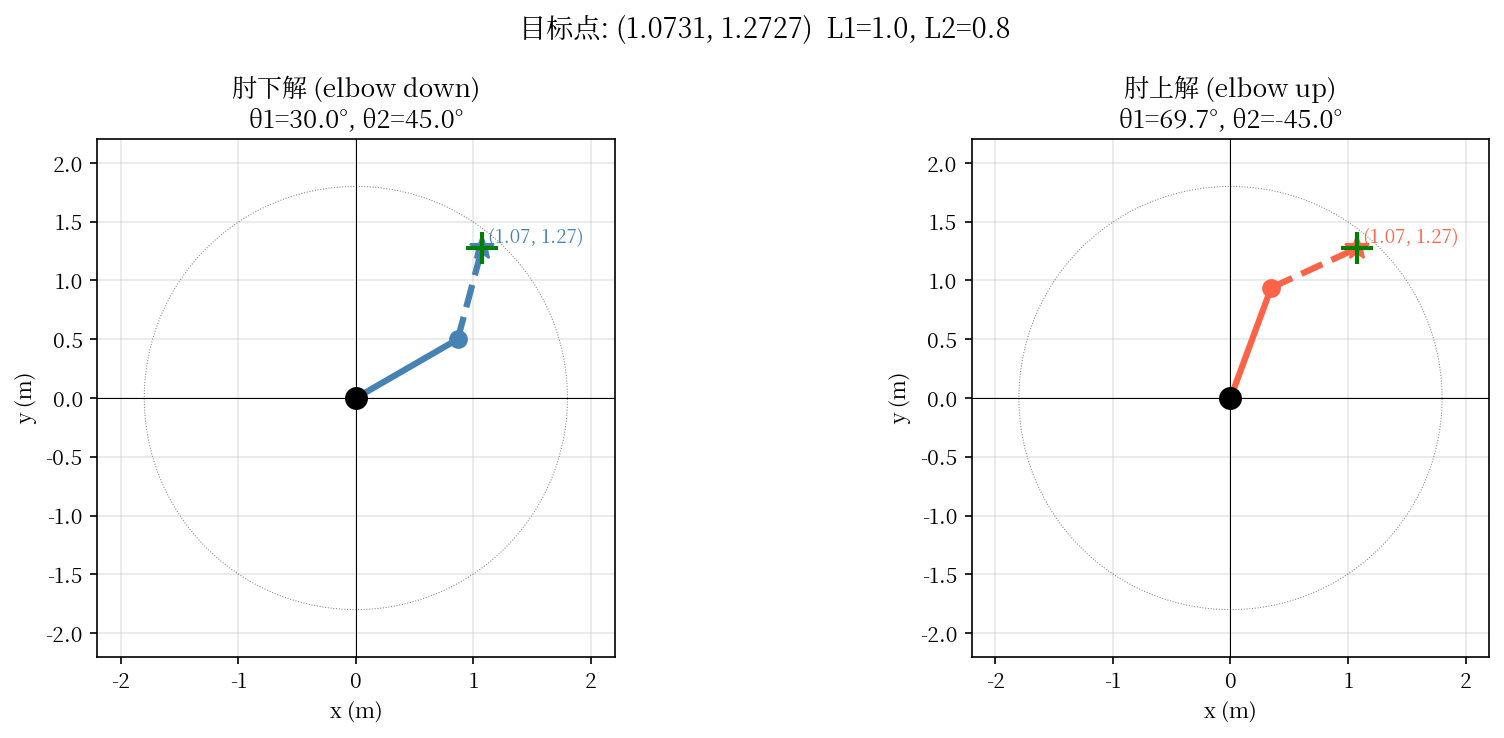
visualize_solutions(1.0731, 1.2727, L1=1.0, L2=0.8)
运行后会生成一张图,左边是肘下解,右边是肘上解,末端位置相同但构型不同。
3.8 常见错误
3.8.1 错误一:角度单位混用
# 错误:把度数直接传给 math.sin
x = L1 * math.cos(30) + L2 * math.cos(30 + 45) # 30 被当成弧度!
# 正确:先换算成弧度
theta1 = math.radians(30)
theta2 = math.radians(45)
x = L1 * math.cos(theta1) + L2 * math.cos(theta1 + theta2)
怎么发现这个错误:结果数值看起来"差不多对"但不完全对,因为小角度时弧度和度数数值接近。用 round-trip 测试可以立刻发现。
3.8.2 错误二:acos 输入越界
# 错误:直接调用 acos,没有处理浮点误差
cos_theta2 = (r_sq - L1**2 - L2**2) / (2 * L1 * L2)
theta2 = math.acos(cos_theta2) # 如果 cos_theta2 = 1.0000000000000002,会抛出异常
# 正确:先 clip 到 [-1, 1]
cos_theta2 = max(-1.0, min(1.0, cos_theta2))
theta2 = math.acos(cos_theta2)
什么时候会触发:目标点刚好在工作空间边界时,浮点运算可能产生极小的误差,导致 cos_theta2 略微超出 [-1, 1]。
3.8.3 错误三:只保留一组 IK 解
# 错误:只返回肘下解
theta2 = math.acos(cos_theta2) # 只取正值
# 正确:同时返回两组解
theta2_down = math.acos(cos_theta2)
theta2_up = -theta2_down
后果:在某些构型下,肘下解可能超出关节限位或碰到障碍物,但肘上解是可行的。只保留一组解会让规划器无法找到可行路径。
3.8.4 错误四:没有验证 IK 结果
写完 IK 函数后,一定要用 round-trip 测试验证。不验证的话,公式里一个符号写错(比如 + 写成 -),结果看起来"有数字"但完全错误。
本讲核心总结
| 概念 | 一句话理解 |
|---|---|
| FK 公式来源 | 关节2位置 + 第二段连杆在全局方向的投影 |
| IK 用余弦定理 | 把 FK 公式两边平方相加,消去 θ1,得到 cos(θ2) |
| 双解 | arccos 有正负两个值,对应肘上/肘下两种构型 |
| 工作空间 | 圆环,内径 |L1-L2|,外径 L1+L2 |
| round-trip 测试 | IK 结果代回 FK,误差应 < 1e-10 |
| acos 越界 | 边界情况下浮点误差会导致输入略超 [-1,1],必须 clip |
参考代码
本讲对应的完整参考代码位于:
ros_ws/scripts/lesson_03_two_link_kinematics.py
文件内容:FK、IK 完整实现(含双解、可达性检查、round-trip 验证、matplotlib 可视化),含详细原理注释。
直接运行(无需 ROS2 环境):
python3 $ROS_WS/scripts/lesson_03_two_link_kinematics.py
第4讲会把
forward_kinematics/inverse_kinematics函数移入 ROS2 包my_robot_basics,作为节点的算法核心复用。
下一讲预告
4. ROS2 工程基础
这一讲的 FK 和 IK 函数现在是独立的 Python 脚本,用 python3 two_link_kinematics.py 直接运行。下一讲我们会:
- 创建 ROS2 工作空间和第一个功能包
my_robot_basics - 理解
package.xml、setup.py、colcon build的作用 - 把 FK/IK 函数放进 ROS2 节点,用
ros2 run启动 - 掌握
ros2 node list等常用 CLI 工具
从这里开始,纯数学代码和 ROS2 工程正式接轨。